

«ИДЕАЛЬНЫЙ МИР В НАШЕМ ПРЕДСТАВЛЕНИИ — ЭТО МИР, В КОТОРОМ ЛЮБОЙ ЧЕЛОВЕК МОЖЕТ ПОЙТИ В МАГАЗИН И КУПИТЬ ТАМ РОБОТА»
Анна ГУСЕВА, 22 августа 2014
Сооснователи компании по созданию робота-манипулятора «H1 Robots», брат и сестра Георгий и Ксения Ратушные рассказали корреспонденту «Первой линии» о том, как своими разработками они приближают эпоху, когда робота можно будет приобрести так же просто, как холодильник.
Мы не думаем, что должны произойти какие-нибудь радикальные изменения в сознании людей. К роботам-пылесосам все привыкли, ни у кого не вызывает шок их присутствие в доме. Если робот делает что-то полезное и делает это хорошо, его просто перестанут замечать, начнут воспринимать как должное.
Первый путь к желаемому статусу кво — приготовление еды с помощью робота. В идеале это должно выглядеть так: у вас на кухне рядом с плитой установлены два манипулятора (одному будет трудно нарезать, к примеру, помидоры). Вы кладете продукты на это пространство, выбираете через планшет блюдо, которое хотите приготовить, запускаете программу и со спокойной душой уходите отдыхать. Пока вас нет на кухне, манипуляторы режут овощи, панируют мясо, разогревают плиту, жарят продукты, строго соблюдая время, указанное в рецепте, выкладывают приготовленное. Когда все готово, у вас появляется уведомление, что вы можете идти ужинать.
Вряд ли это удастся реализовать быстро, нужно будет решить множество сложных проблем. Но если мы все сделаем правильно, то лет через 5-7 роботы, готовящие еду, станут столь же ординарной вещью, как и роботы-пылесосы сейчас.
Не могли бы вы пояснить, что такое робот-манипулятор?
Это робот, основной задачей которого является перемещение предметов. В самом бытовом смысле этого слова – взять что-нибудь, положить в другое место. Иногда – переместить, соблюдая заданную траекторию и скорость перемещения. То есть это робот, решающий те же самые задачи, которые человек может решить с помощью своих рук – но быстрее, точнее и дешевле.

На сайте H1 Robots указано, что ваша цель – «создание максимально дешевого и универсального робота-манипулятора». В чем будет проявляться универсальность модели? В возможности ее использования как на производстве, так и в быту?
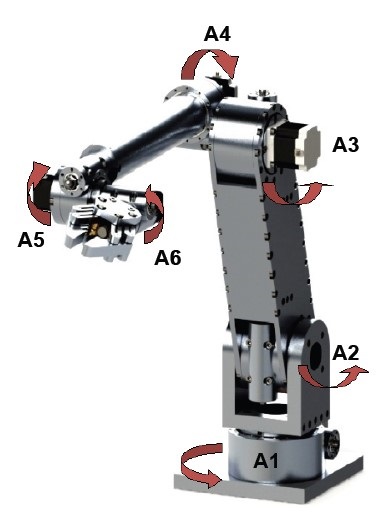
Термин «универсальность» мы используем в нескольких значениях. Первое значение наименее очевидно, и для пояснения необходимо немного углубиться в математику. Положение каждого видимого нами твердого предмета можно описать шестью числами – координатами в пространстве. К примеру, представим яблоко: оно может быть дальше или ближе (первая координата), левее или правее (вторая), выше или ниже (третья). Но, помимо этого, яблоко можно вращать тремя разными способами — по часовой или против часовой стрелки вокруг тех осей, про которые сказано выше, и, таким образом, появляются еще три координаты, описывающие положение яблока. Это универсальное правило: для любого твердого тела необходимо именно 6 чисел для полного описания его положения в пространстве. Если чисел будет 5, мы не будем знать о предмете чего-нибудь. Например, не сможем сказать, как далеко расположено яблоко или каким боком оно к нам повернуто.
У нашего робота 6 степеней свободы. Степенью свободы называется каждый «сустав», в котором робот может сгибаться или вращаться. Если выполнено несколько не очень сложных правил при проектировании робота, то степень свободы — это показатель того, как много действий может совершить робот. Если он имеет 6 степеней свободы, то он может взять яблоко в любом положении и переложить его в любое другое — включая все возможные повороты в пространстве, если, конечно, он способен до этой точки дотянуться. Эти 6 степеней свободы позволяют перемещать предметы, указывая для начальной и конечной точки траектории все 6 координат тела. В этом смысле его универсальность в том, что для него нет ограничений на операции с предметами. Если бы он имел, например, три степени свободы, он мог бы перемещать яблоко в пространстве, но без возможности его повернуть, если бы имел 7, он был бы избыточным и мог перемещать предметы разными способами.
Второй смысл слова «универсальность» совпадает с тем, который восприняли вы. Мы надеемся, что сможем использовать нашего робота как в промышленном производстве, так и в быту. Бытовое использование является нашей целью: идеальный мир в нашем представлении — это мир, в котором любой человек может пойти в магазин и купить там робота, как сейчас покупает холодильник или машину, и этот робот будет приносить человеку реальную пользу. Но мы понимаем, что до этого момента мы должны пройти долгий путь, и потому сначала робот, вероятно, будет использоваться в промышленной или околопромышленной сфере.
Но при этом «универсальность» робота не всеобъемлюща. В промышленности применяются множество типов роботов, и даже манипуляторы того типа, который мы разрабатываем, могут иметь десятки типов «насадок» для самых разных операций. С этой точки зрения наша конструкция имеет весьма узкую нишу.
Расскажите, почему вы решили создать свой проект, а не работать в существующем, заниматься созданием роботов, а не другими разработками.
Проект родился из простой идеи: «Роботы превосходят человека практически во всем. В долгосрочной перспективе они полностью освободят людей от необходимости выполнять какую-либо физическую работу. Что невозможно предотвратить, необходимо возглавить». Идея достаточно проста, но в тот момент, когда проект начинался, мы не имели ни малейшего представления, как ее реализовать. Мы не знали аналогичных проектов и потому решили создавать свой. Это позволило избежать чужих ошибок и совершить свои, часть которых мы еще не видим. Но уже сейчас можно понять, что путь, которым мы идем, отличается от пути, которым идет большинство команд: мы двигаемся от механики, считая первостепенным обеспечение точности, позволяющей выполнять обычные бытовые операции (около 1 миллиметра). Большая часть других команд шла от софта: они были основаны программистами, которые знали, как рассчитать траекторию движения робота, но просчеты в конструировании механики приводили к тому, что реальное положение «руки» оказывалось в нескольких сантиметрах от предсказанного программой, а этого было уже явно недостаточно для практически любой прикладной задачи.
Впрочем, существуют команды, которые, как и мы, начинали с механики, но практически все они были сконцентрированы на том, чтобы сделать лучшего робота из возможных. Работа не на переднем крае современной инженерной науки была для них неприемлемой. В результате у них получались прекрасные модели, которыми можно восхищаться, но которые были слишком дороги, чтобы их могли купить. Мы стараемся избежать этих двух крайностей и сделать манипулятор, который был бы, с одной стороны, достаточно качественным, а с другой, имел бы приемлемую цену, и мы верим, что у нас есть возможность этой цели достичь.
Что входит в функционал разрабатываемого вами робота?
Пока разработки только ведутся, и мы даже еще не собрали робота целиком. Сейчас мы можем, нажимая на кнопку, заставлять одну из степеней робота сгибаться или разгибаться. Это один из первых этапов разработки. Нам еще многое предстоит сделать перед тем, как мы сможем представить первую нашу модель.
Минимальный функционал, с которым мы сможем выпустить продукт на рынок — робот сможет последовательно выполнять заложенную в него программу в виде «из точки А перейди в точку В, захвати предмет, подожди 3 секунды, перейди в точку С и так далее». То, что мы имеем сейчас (ручное управление), является первым слоем технологий в нашем роботе. Вторым будет внешнее компьютерное управление, прохождение маршрута по точкам. Третьим слоем технологий, вероятно, станет уже автоматическое нахождение ключевых точек с помощью видеокамер и корректирование происходящих процессов: если нужно взять предмет, а система увидит, что он сместился, она скорректирует свои действия. На этом слое технологий можно строить следующие, которые будут делать роботов полезней для человека, но говорить об этом пока рано.
На какой стадии сейчас разработка модели?
Если говорить о компьютерной модели, она готова. Мы несколько раз переделывали ее практически полностью, и даже сейчас она продолжает ежемесячно меняться, но у нас уже есть понимание того, как робот будет выглядеть. Если говорить о воплощении модели в металле, о создании прототипа, мы сейчас работаем над этим. Изготовлена большая часть деталей, мы можем почти полностью собрать нашего робота в единое целое, но остается много проблем, из-за которых процесс останавливается или даже идет вспять: например, недавно мы решили изменить конструкцию и заменить четыре типа редукторов двумя. В будущем это позволит снизить себестоимость, лишь незначительно ухудшив основные характеристики. Но на практике это обернулось тем, что мы не стали использовать уже готовые детали, а вместо них сейчас изготавливаем новые. Подобных проблем множество, некоторые из них приводят к увеличению сроков, другие мы преодолеваем, но из-за этого сейчас мы не хотели бы называть никаких дат. Будет неудобно, если мы назовем сроки и не сможем в них уложиться.
Создание робота, который стоит на порядок меньше, чем модели конкурентов, – самоцель, или это так удачно совпало, что воплощение в жизнь вашей инновационной технической идеи требует относительно меньше затрат, соответственно, цена робота будет ниже, чем у других производителей?
Снижение цены — это одна из основных целей проекта. Чтобы робототехника стала по-настоящему массовой, она должна быть очень дешевой. Чем больше будет объем производства, тем сильнее в дальнейшем будет снижаться цена и тем больше роботы будут распространяться. Но нужно, чтобы этот самоподдерживающийся процесс с чего-то начался. Для этого необходимо, чтобы польза, которую купленный робот мог бы принести, была очевидно выше его цены. Мы определили набор минимальных характеристик, которым должен соответствовать робот (таких как точность и скорость работы), и, считая их ориентиром, пытаемся, без ущерба для них, максимально снизить цену.
Если не секрет, по какой цене планируется продавать робота?
Мы еще не определились с производственной площадкой, поэтому даже не знаем точную себестоимость. Пока мы ориентируемся на цену в 150 тысяч рублей за «руку» при объеме партии около 100 штук. Это слишком дорого для обычного человека, но конструкция, над которой мы работаем, имеет прекрасный потенциал для снижения цены при увеличении объемов производства.
Как вы представляете себе клиента «H1 Robots»?
Сначала это будут средние компании, которым выгодней купить робота, чем платить зарплату человеку, занимающемуся простой однообразной работой. Это позволит снизить цену и улучшить продукт. Затем можно будет переходить к малому бизнесу, для которого робот может стать как способом сэкономить, так и некоторым репутационным фактором (например, ресторан, где робот готовит еду на открытой кухне). Только после этого, когда мы сможем уменьшить цену хотя бы до 50 тысяч рублей, можно будет выходить на потребительский рынок, где решение о покупке будут принимать простые люди. Наша задача – подготовить технологию к этому моменту таким образом, чтобы ее плюсы очевидным образом превосходили цену.
Насколько тяжело выживать проектам, подобным вашему, на стадии создания продукта, когда прибыли еще нет? Сложно ли привлекать инвестиции?
Пока мы не привлекали инвестиций и не намерены делать этого в ближайшем будущем. Проект развивается за счет собственных средств, которые мы получаем из достаточно стабильных источников (Ксения возглавляет собственное PR-агентство, Георгий работает в страховой компании). Для команды этот вариант является достаточно удобным, он позволяет избежать тирании дедлайнов и принуждения к выпуску заведомо плохого продукта на рынок. Можно считать это затратным хобби, а не бизнесом, до момента, когда мы будем готовы выпустить наш продукт. Мы рассматриваем возможность получения инвестиций, но только если выгоды от них будут превосходить те ограничения, которые этими деньгами будут на нас наложены.
Мы думаем, что деньги играют решающую роль, когда их не хватает, и являются просто инструментом, когда их достаточно. Впрочем, так можно сказать про любой фактор, который влияет на проект. Поэтому мы предложим еще одно суждение, которое является очень субъективным: технологии давно позволяют нам делать вещи, которые мы, встретив впервые, сочтем чудом. Мы можем сделать практически все, что способны вообразить. Основным ограничением остается то, какому количеству людей нужна эта технология за такие деньги. Но если технология нужна большому количеству людей, запускается обратная связь, которая приводит к развитию и удешевлению технологии. Мы видели эти петли обратной связи в технике уже не раз, и они полностью изменили наш мир. Наша цель — создать подобную связь и для роботов.
Фотографии 3-D модели робота – из архива героев
Пока без комментариев